I love to solve problems utilizing the tools and skills I have aquired in my life. I love to tinker, build and learn new things. My passions involve mechancial design, electronics, programming and control.
Welcome to my personal website. This website is a portfolio that desrcribes myself, what I have accomplished, my experiences, and what I aim to achieve. I was born and raised in Burlington, Ontario, Canada, a quiet suburb about an hour outside of downtown Toronto. I grew up in a culturally diverse household with my mother and father both immigrants from Japan and Greece, respectively. Through this blessing I have been a part of two very beautiful cultures. I am able to speak 3 languages, English, Japanese and Greek. Throughout my high school days, I focused on basketball and football. I enjoyed playing organized team sports and to this day it has contributed significantly to who I am. Basketball and Football gave me many skills that cannot be obtained in a classroom. I am thankful for the experiences and lasting friendships I gained from playing those sports in my youth.
After high school, I pursued an engineering degree at the University of Guelph. School was never something I had a significant care for. However, my interests in school were physics and math and from a young age I always enjoyed building things, hence, my mother insisted that I should go into engineering. Like most people I was not sure if this was the right path to take, luckily, I did not see myself in any other field. Additionally, the challenge of an engineering degree was appealing to me. I finished my undergraduate degree in mechanical engineering in four years. I thoroughly enjoyed my time at the University of Guelph with the many friendships and experiences I was able to obtain. I was able to gain a plethora of skills both techincal and soft, and more importantly, I found a career path that I am passionate about in the field of robotics and mechatronics.
I spend a lot of my free time researching upcoming technologies and tinkering with different things that interest me. I also thoroughly enjoy travelling, I have been to 10 different countries, many of which I visited while living in Germany for a summer. I am very outgoing, open-minded and enjoy deep conversations, however, I do value the time I have to myself. My career goal is to be in the robotics industry and to have some contribution to innovative technologies that shape the way we live.
September 2019 - Present
I will be starting my Master of Applied Science degree at the University of Toronto in the coming Fall. My research will be in the field of Multi-Robot Coordination.
September 2015 - Present
Graduated from the University of Guelph in April of 2019 with a Bachelor of Engineering with my major in mechanical engineering. I met and made many good friends and colleagues throughout my time at this University while developing thorough technical and soft skills necessary in the engineering profession. The Engineering Program is an exceptional program that emphasized not only the knowledge required to be an engineer but also requiring the students to apply the concepts learned in class through various design courses and projects every year. Being a hands-on learner myself made my learning experience at Guelph exceptional. I truly enjoyed my time at the University of Guelph and I will take the lessons and skills I learned on to my future endeavors.
September 2010 - June 2015
Graduated from Nelson highschool in June of 2014 and returned for an extra year to pursue athletics and find the undergraduate program that interested me the most. My most notable achievement from high school was winning the Most Valuable Player (MVP) award for the Nelson Lords Football Team for the 2014-2015 school year.
January 2019 - April 2019
I worked under a PhD student within the Robotics Institute at the University of Guelph. I developed an understanding in deep learning methodologies utilizing TensorFlow and Keras for image classification used for environmental applications. I was introduced to Docker for team collaboration and work distribution. I mainly experimented with image augmentation and image resolution sizing converting low-resolution images to higher resolution images utilizing deep neural networks. I did not accomplish significant work during my time here, however, I was able to learn a signficant amount in deep learning applications and team dynamics within a programming team.
September 2018 - Decemeber 2018
I worked within the Mechanical Research Lab at the University of Guelph conducting research towards sustainable bioreactors for biological applications, specifically, the growth, housing and production of biological organisms (algae, shrimp) in a closed system. My tasks included; integration of various sensors (dissolved oxygen, conductivity, pH) within the bioreactor, utilization of LabVIEW for a user interface that tracked and graphed data from the various sensors in real-time allowing for data interpretation, and the design and implementation of a permeable tube mount using SOLIDWORKS and a 3D printer which was necessary for mass transfer of nutrients into the system. This work experience allowed me to understand the details required when dealing with biological applications as well as the skills necessary to provide optimal solutions when dealing with such issues within this field.
April 2018 - August 2018
I was selected as 1 of 18 students across 9 Ontario universities to take part in the Ontario - Baden Württemberg Summer Research Exchange Program. I lived and worked within the Institute of Automation and Applied Informatics (IAI) at the Karlsurhe Institute of Technology (KIT) in Karlsruhe, Germany. I contributed progress towards the research project of System Integration for Nanophotonic Systems. Some of my tasks included; the mechancial designing and optimization an automated ultra-high precision adhesive dispensing and UV light curing automation process system for micro and nanophotonic applications (photonic wire bonds), development of automation recipes for specific processes utilizing Python and TwinCAT automation software, utilization of MATLAB to develop light ray simulations for polymerization testing of adhesives with different sized apertures, and the design, manufacturing and implementation of custom parts into the automation system utilizing Creo Parametric modeling software and heavy machining tools. I collaborated with various international researchers and industry professionals during my time at KIT. During my freetime I traveled to many different places and countries while I stayed in Germany. This work and life experience was truly amazing in every way, it provided me with personal growth, different perspectives and amazing relationships with the people I met. This experience was truly valuable to me and is something I will always remember and cherish.
May 2019 - September 2019
May 2017 - September 2017
I worked in the engineering department at Sobotec Ltd. I joined the Sobtec Advenced Manufacturing (SAM) Team as an engineering co-operative student. Some of my important tasks included; the modeling of architectural layouts of buildings utilizing SOLIDWORKS and AutoCAD, development of tooling and nesting skills using NC Express Software for heavy machinery automation processing, optimization of the manufacturing processes including material assembly, product fabrication and processing, coded programs for automated panel bending and manufcaturing utilziing Bend Express software for custom architectural panels, operation of heavy manufacturing machinery including Prima Power (EBe Bending, SG Shear and Punch, eP Series Press Break). I developed important skills within the manufacturing industry and was able to collaborate with many exceptional individuals while working within the SAM team. My time at Sobotec Ltd. was truly an amazing experience that provided me with growth, and valuable friendships.
July 2016 - September 2016
Worked on the line as a panel fabricator at Sobotec Ltd. for the manufacturing of panels for building exteriors. I was able to gain thorough understanding of manufacturing systems and process engineering within the panel fabrication industry. This experience tasked me to learn how to use various tools quickly and thoroughly understand blueprint schematics for the manufacturing of panels. I regularly handled advanced power tools for detailed manufacturing and utilized my problem solving skills to efficiently output panels on a daily basis.
May 2017 - February 2018
I was given the opportunity to organize the University of Guelph Professional Development Conference 2018. This conference aimed to engage engineering students with engineering professionals in their respective disciplines. I planned and organized speaker presentations, event schedule and led the volunteer commitee. Approximately 100 engnineering students were in attendance making it the largest and most successful conference in the history of the event at the University of Guelph.
March 2017 - May 2018
I had the opportunity to be a contributing member to the formation of the University of Guelph Hyperloop Team. The Hyperloop Competition is a competition provided by Tesla's Elon Musk where universities across North America contribute different ideas and designs for the global Hyperloop method of transport initiative. I was tasked to be the Captain of Frame for the Hyperloop Team at the University of Guelph. With my team I was able to complete the first phase of the pod frame design.
November 2016 - October 2017
In my second year of undergraduate education, I was asked to lead the University of Guelph Robotics Team and become the President of the club. My role as president was to lead a group of engineering and computer science students to various competitions involving robotics. During my time as president, I was able to organize an in house zumobot competition amongst peers, as well as, develop a 3D printed large scale zumobot for an inter-unversity competition.
September 2016 - April 2019
Over the course of my undergraduate career I have met many Japanese international students through the University of Guelph ELP (English Language Program). I helped these students develop and enhance their english writing, oral and communication skills. I helped with essay writing, conversation assignments, and general english understanding. Being fluent in Japanese I was able to provide a more thorough udnerstanding to these students through direct tranlation.
Here are some of the projects that I have completed on my own or with a team. These projects range from course design projects to personal projects.
Mechanical Engineering Design IV Capstone Project
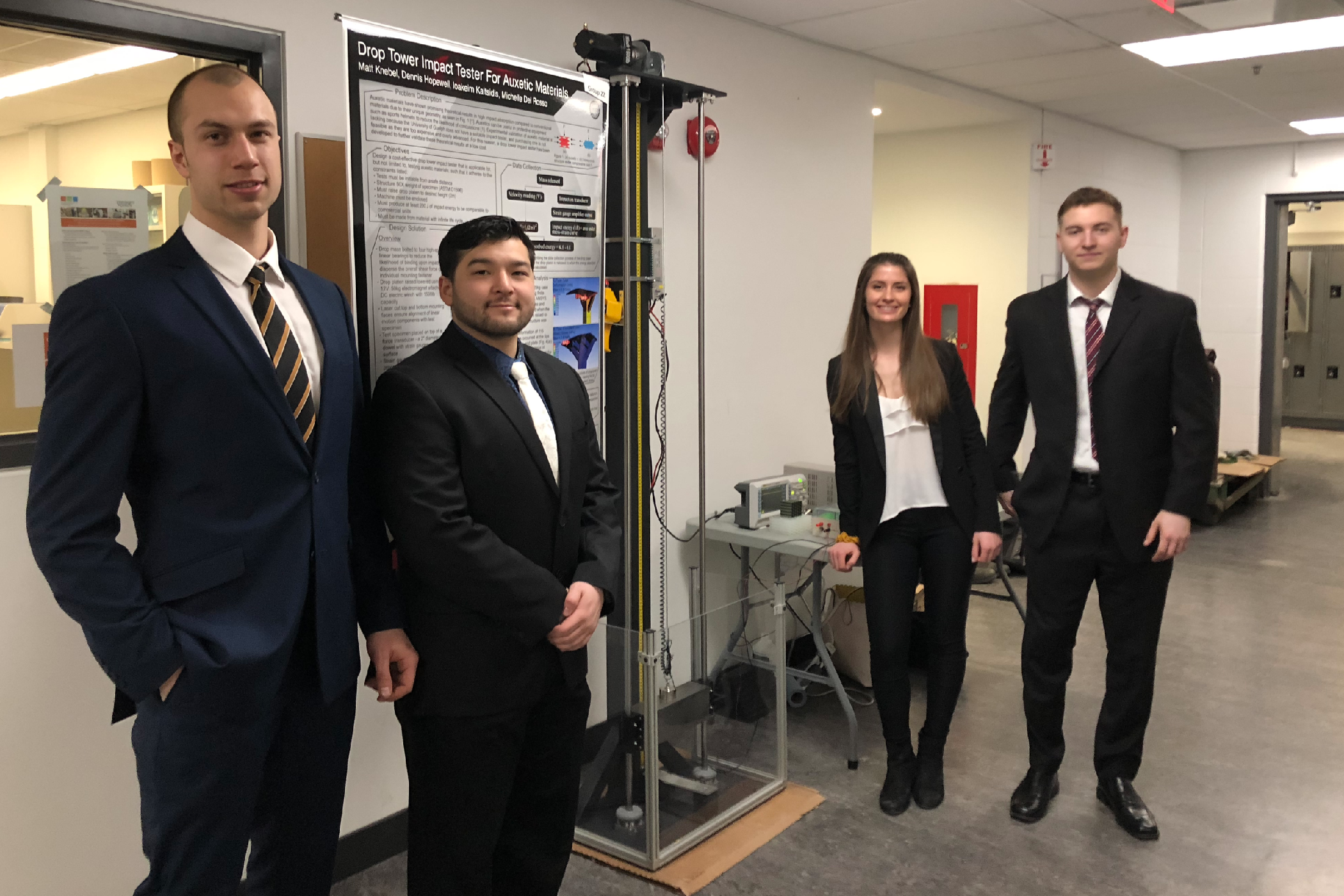
As part of the final year of engineering capstone project. In a design team of four members including myself and a supervising professor, Dr. Hari Simha, we were tasked with developing an impact loading testing device. We developed a drop tower to simulate impact loading for the purpose of testing auxetic materials that can be used in a variety of applications.
Auxetic materials exhibit special properties such as a negative poisson's ratio that allow them to be highly impact absorbent. With such properties applications can be seen in protective equipment (helmets, body gear, military vehicle undersides, etc.). The drop tower was fabricated using primarily steel for the main structure and guide rails for the drop mass. A 20kg steel block mounted on the linear guide rails was used as the drop mass for impact loading. A electric winch with an electromagnet was used to hold and bring up the mass for each impact test.
Data acquisition was conducted using a strain gauge amplifier and strain gauge sensors mounted on an aluminum cylinder force transducer. The primary data measurement that was required was strain and using the wheatstone bridge setup within the strain gauge amplifier, strain of test specimens can be measured upon impact of the force transducer utilizing an oscilloscope. With strain measured energy absorption in material can be found with stress-strain calculations.
The project URL displays the drop tower impact tester, along with the physical demo of an impact loading test.
Project URL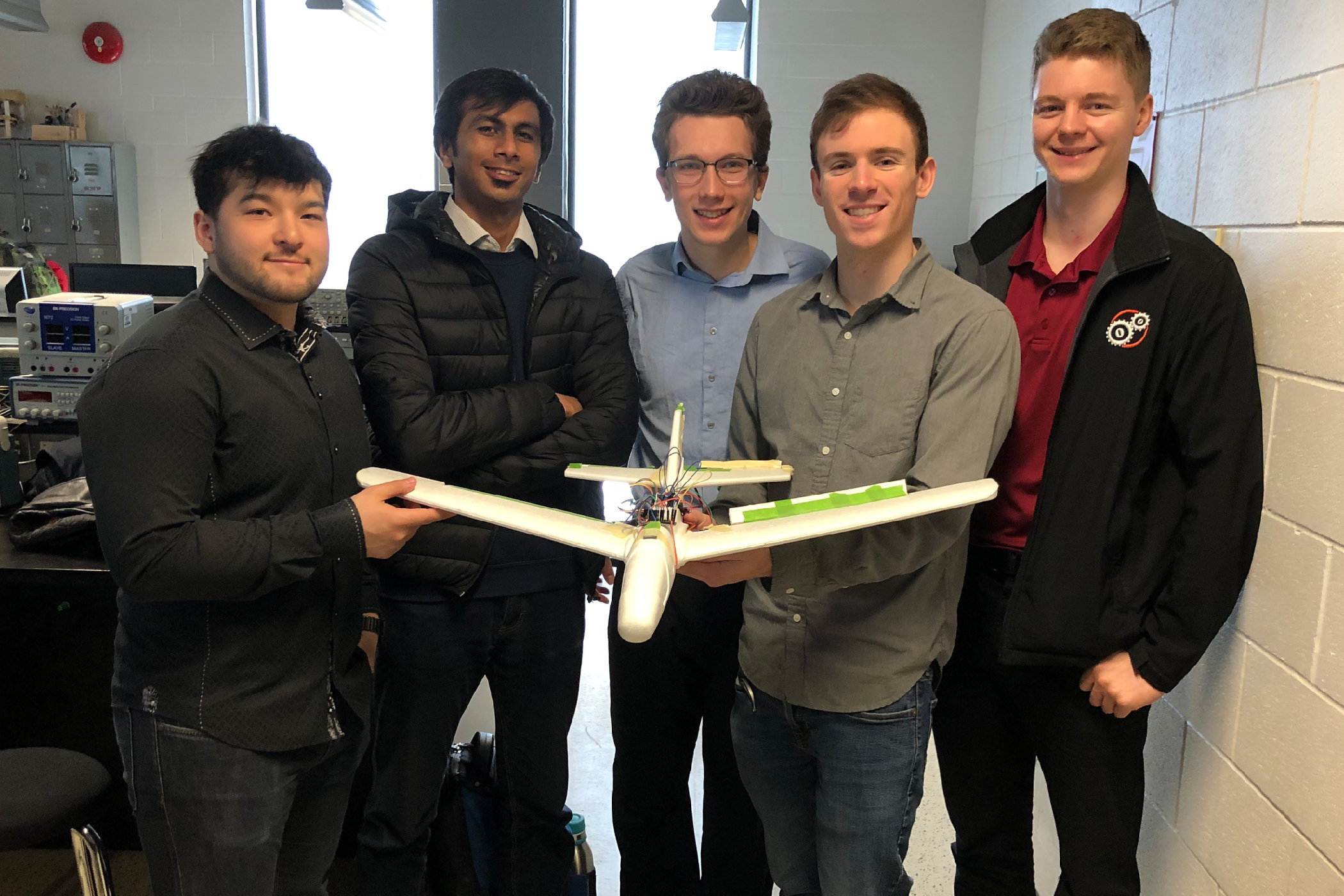
Advanced Mechatronics Systems Design Course Project
As part of the fourth year Advanced Mechatronics Systems Design Course. In a design team of five members including myself, we were tasked with developing a mechatronics project that was intended to be a lab experiment for future students. The project had to be something that would teach important concepts in the field of mechatronics with a final prototype. Our team decided to develop an autonomous gliding plane.
The body of the prototype used a styrofoam RC plane. An Arduino Nano, an IMU sensor and 5 micro-servos were the main electonics of the system. The PID library from Arduino was used as the controller for the aircraft. The zero position was considered to be when the aircraft had no roll, pitch or yaw angles. When the plane was no longer in the zero position, the IMU would sense the orientation and the PID controller would send signals to the servos, actuating the wings and rudder to correct the error and revert the plane back to the zero position. This project teaches how to physically implement a mechatronic system incorporating a control system, sensors and actuators. The project URL displays the prototype of the Autonomous Gliding Plane with visuals and a video of the working system.
Project URL
Digital Process Control Design Course Project
As part of the fourth year Digital Process Control Systems Design course. In a design team of five members including myself, we were tasked with developing a control system utilizing MATLAB and Simulink on a 4-Tank Cross Coupled System. This project had a very open-ended nature as the constraints and requirements to be met were designed by the team implementing the control system. Several professional reports were prepared, a proposal of the constraints and requirements to be controlled, a modelling report outlining how the system was modelled, a control report describing the control methods, and a final report encompassing the entire project. A formal demo was also required to display the controlling of the 4-Tank Cross Coupled System with the implemented control design.
For our project we aimed to have full control of both, the left side and right side bottom tanks. The set points for both bottom tanks could be chosen to any height and our implemented control system would reach the given set point and remain at the set point even when disturbances were introduced. Our system was modelled utilizing Jacobian Linearization, our control method utilized two PD controllers with a decoupler implemented into the system. The project URL displays the system, model and control diagrams as well as the physical demo of the 4-tank cross coupled system control project.
Project URL
Introduction to Mechatronic Systems Design Course Project
As part of the third year Introduction to Mechatronics Systems Design course. In a design team of 5 members including myself, we were tasked with developing a machine that could determine the type of screw nut it was given and sort these screw nuts to their respective piles. Furthermore, the machine was to be able to differentiate between coins as well. The types of screw nuts that had to be sorted were large brass, large plastic, small brass, and small steel nuts. The constraints for this nut sorting machine was that the machine could not be past certain dimensions in height, width and length. Additionally, the machine had to be cost effective meaning less sensors used to sort the items resulted in a higher grade and the material cost could not exceed $50.00. The provided electronics were an Adruino Mega 2560, stepper motor, servo, motor controller, and various sensors (interrupt switches, hall effect, thermistor, force, etc.).
Our design utilized two interrupt switches and a conductivity switch. The code involved utilizing interrupts to synchronize with the stepper motor steps, therefore, a certain amount of rotation of the stepper motor would allow the object to go through all the sensors and give the servo enough time to rotate to the proper cup based on the triggered interrupt sensors to drop the object. The manufacturing of the machine consisted of wood, acrylic tubing, and aluminum attached utilizing various fasteners. The project URL is the finished machine showing the accurate and efficient sorting of each type of nut as well as the different coins.
Project URL
Machine Design Course Project
As part of the third year Machine Design course. In a team of 5 members including myself, we were tasked with developing a machine that served as a solution either in the agricultural or food industry. Utilizing course concepts and machining capabilities learned in previous courses, our team designed and manufactured a product.
Our design project went under the agricultural category and was to solve the issue with residential lawn aerating. Most residential lawn aerators are manual and the task at hand can be very labor intensive and time consuming. We developed a motorized aerator for residential use that would be cost, time and effort effective. The Project URL provides you with the design video of our motorized aerator machine design project.
Project URL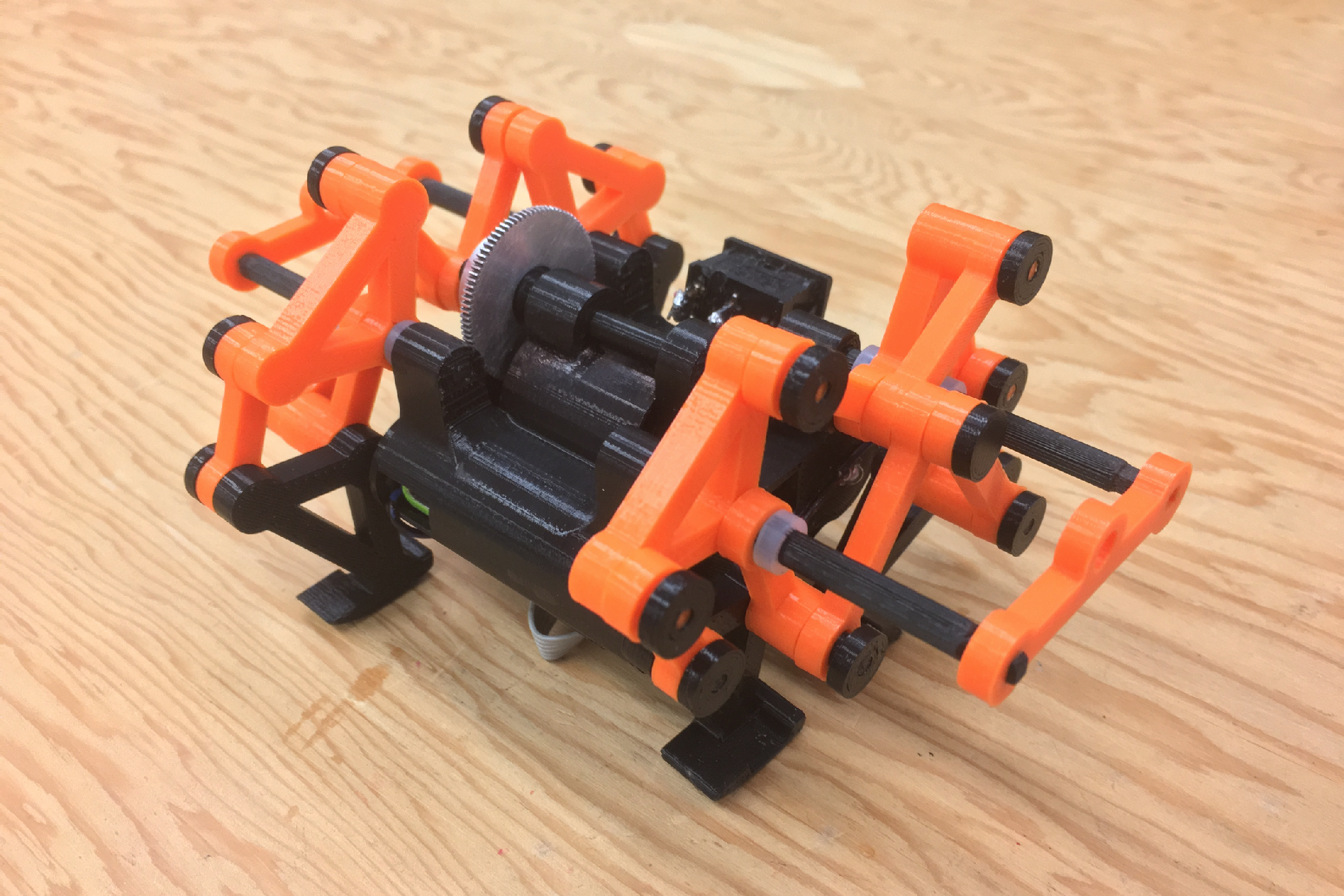
Engineering Design II Course Project
As part of the second year Engineering Design 2 course. In a design team of 5 students including myself, we were presented with the option of designing a device with the following constraints: it must be able to fit inside a large Easter kinder egg treat when disassembled, but be larger than the egg assembled. It must traverse 2.5 meters by: ground, projectile motion or vertical flight.
Our device followed the ground traversing method. We designed our mechanism based off of Theo Jansen’s Strandbeest. The mechanism was first designed in SOLIDWORKS to ensure a working prototype could be developed. The individual components were designed to be able to snap fit together, it also incorporated a simple wired DC circuit with a switch, portable battery and motor to operate the mechanism. The device worked on most surfaces, but due to the two legged design based on space and assembly constraints of the kinder egg, as well as, the alignment of the motor in the battery encasement creating a weight imbalance, the W.A.H.M. walked in a helical path on wood. The Project URL is a video of the W.A.H.M. walking.
Project URL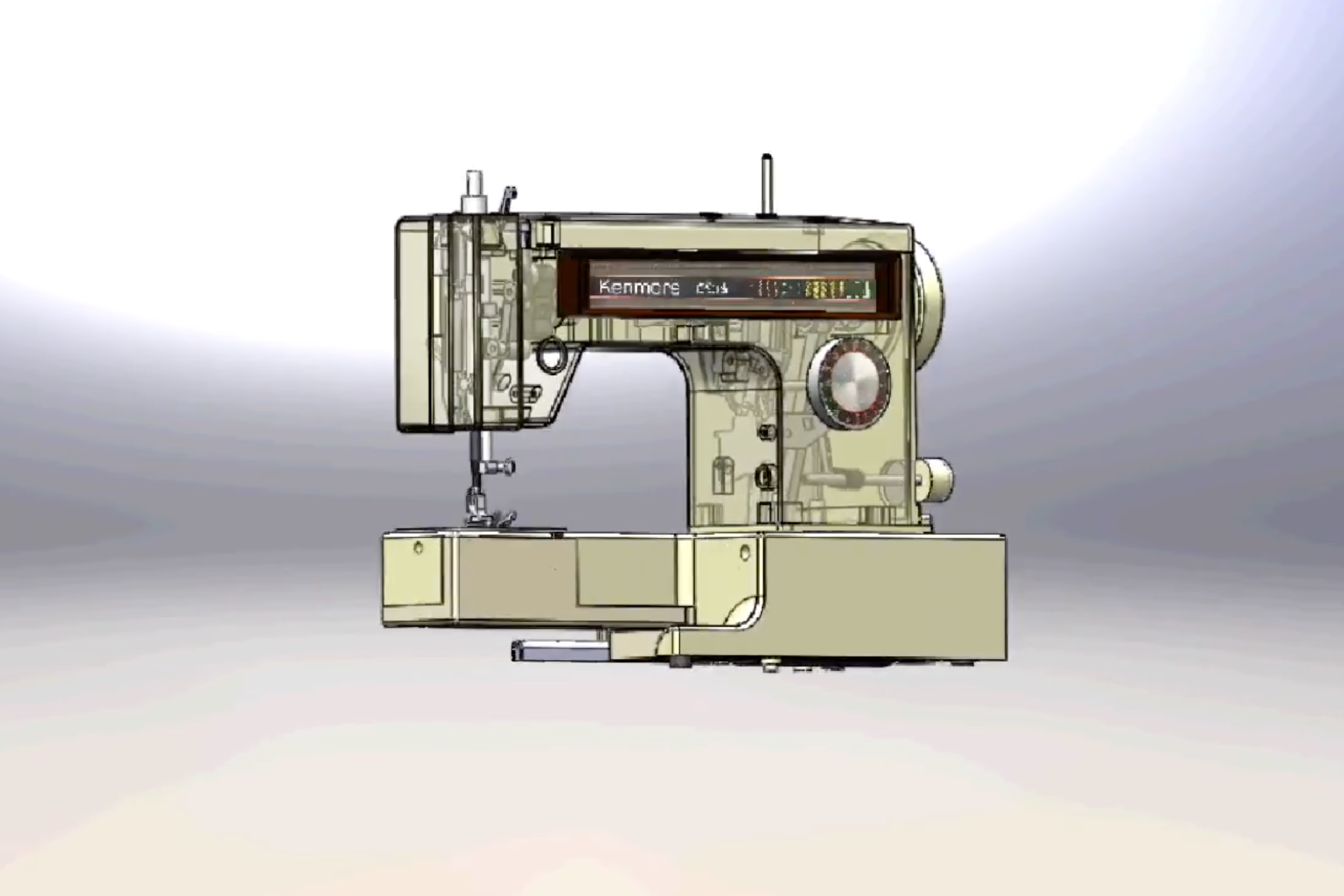
Engineering Design II Course Project
As part of the second year Engineering Design 2 course. In a team of 5 students including myself, we were tasked with the deconstruction of a sewing machine, documenting each component disassembled. Then the reconstruction of the sewing machine in SOLIDWORKS matching the physical model of the sewing machine.
The team members divided up generating the parts of the sewing machine in SOLIDWORKS. We were then tasked to generate our own independent video of a SOLIDWORKS animation of the sewing machine. The Project URL displays the modelled animation.
Project URL
Engineering Design I Course Project
As part of the first year Engineering Design 1 course. In a team of 5 members including myself, we were tasked with the designing of a mechanno kit vehicle that incorporated an Arduino interfaced drive train utilizing a motor. The vehicle had to meet certain constraints: it had to be able to traverse a specified distance and overcome 2 speed bumps at a height of 1cm between the specified distance. The vehicle could not tip when placed on a ramp with an angle of 30 degrees. Additionally, the vehicle had to be able to launch a ping pong ball through some sort of mechanism on the vehicle into a hoop at a height of 2 meters from a fixed distance from the start point.
All these constraints had to be met while a passenger sat in the vehicle and the passenger must have been able to fall out of the vehicle when the vehicle was inverted. The vehicle was fully designed in SOLIDWORKS and analyzed to determine centre of gravity. Launch angle angle and power of ping pong ball as well as tipping angle we’re all calculated by hand. Actual functionality of motor was done with trial and error of Arduino code interfacing in order to launch ping pong ball through hoop and traverse specified distance with speed bumps. The Project URL is the documentation video of the vehicle undergoing the two trials.
Project URLThe beautiful places and things I have seen that are worth writing about.
If anything I am interested in, anything I do or have done is something we have in common please do not hesitate to contact me. I am always available for inquires. You can reach me on LinkedIn, or by Mail. I look forward to meeting and thank you very much for your time.
Ioakeim.Kaltsidis@gmail.com